The research into stereokinetic phenomena addresses the issue of deformations through movements in visual space. Benussi called stereokinesis the phenomenon that occurs when an actual or apparent movement of a figure on a frontal-parallel plane yields a transformation, according to which it no longer appears as a plane figure but rather as a rigid object in depth, while the movement no longer appears to take place on the plane but rather in the three-dimensional space (Benussi 1922/1923 and 1918 for the analysis of movement). Musatti (1924, 1955, 1975) investigates the conditions of stereokinetic phenomena and their various forms: the appearances of rigidity and in-depth movement founded on stroboscopic movement, the phenomenal identity of points and figures that brings about a vector decomposition of their motion in Cartesian or polar coordinates, the rotation of circular figures with constant curvature and the rotation of straight open or closed figures. The common perceptual factor underlying all these phenomena is the “stability of orientation,” that is to say the tendency of moving objects to preserve a perceptually stable orientation in an absolute system of spatial axes in relation to the observer. This factor induces a change from the actual rigid into an apparent non-rigid motion on a plane, that is, either relative motion or elastic deformation, of the objects. The stereokinetic appearance of a moving three-dimensional body in depth results from the trade-off between the rigidity of objects, which requires the constancy of their properties, and the stability of the spatial orientation. The following figures will exemplify Musatti’s analysis.

The relative position of the points of two nested circles that are drawn on a disc rotating clockwise is actually maintained during the rotation (see figure 27). Every point of the inner circle maintains its direction to the center of the outer circle and vice versa. However, there is no feature that phenomenally distinguishes the points. Every point of each circle is so similar to any other that the points can pass into one another during the rotation as if the same point was visually located in the same position along the circle. Consequently, each circle appears stably oriented in space, in the sense that the points that appear located at the top of the circle in relation to the absolute coordinates of the observer keep their position through the whole rotation. The same holds for the points that appear located at the bottom of the circle. This stability of orientation is at odds with the actual location and orientation that are bound to the disc rotation. Each circle maintains the direction from any point toward the top or the bottom of the absolute spatial coordinates rather than toward each other. Without any distinguishing feature that enables one to see the constant relative position of points during the rotation, the stability of orientation makes the rotational component of motion disappear. Translation, then, is the only component of the motion that can be perceived. For instance, at the 90° period, the inner circle appears to be displaced with respect to the outer circle. Consequently, the relation of its motion to the plane of the disc is no longer perceived. The inner disc becomes the minor base of a truncated cone, the outer disc becomes its major base, while the disc disappears as an independent perceptual thing. The truncated cone rotates freely in space in the same direction as the disc rotation.
Musatti shows that the disappeared rotational component can become visible again. If a single circle is drawn eccentrically on a disc like in figure 28, the stability of orientation induces a perceptual decomposition of motion.
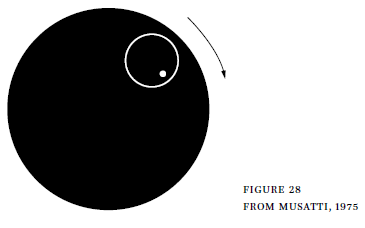
Since the circle preserves the direction of every point in the absolute coordinates centered on the observer, the trajectory of each point is decomposed into a visible translation with respect to the disc and an invisible rotation along the circle itself. If a dot is drawn on the circle, it brings in a visual heterogeneity that prevents the actual direction of points towards the center of the disc from disappearing. The circle continues its apparent revolution on the disc plane preserving its stable orientation. At the same time, the dot appears to slide on the circle in the direction of the rotation, covering its circumference in a complete rotation’s period. The rotational component has thus become apparent again, but as if the rotation of points together with the circle were perceptually transferred to the dot. Indeed, if a dot is drawn on each circle of the previous figure, the constant relative position of the circles becomes apparent (cf. Prof- itt et al., 1992). The dots become the perceptual markers of their actual location and orientation in relation to the disc. Thus during the rotation the circles appear to be fixed with respect to each other and the stability of orientation does not take place, and consequently there is no appearance of a solid object displaced in depth.
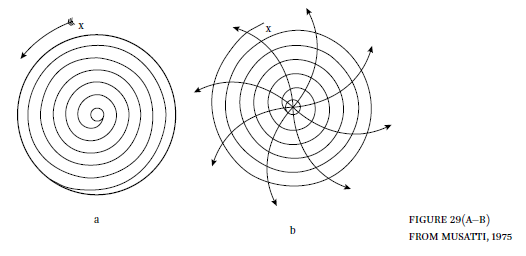
In a spiral of constant pitch drawn on a rotating disc, every point realizes a circular motion. Because all points resemble one another, every point can be perceptually identified with those that during the motion happen to lie on the minimal trajectory (see figure 29a).
The circular motion is thus decomposed into a visible radial and an invisible rotational component along the spiral itself. If the pitch of the spiral is very small, the rotation disappears completely (see Wertheimer, 1912a). Therefore, at a slow rotation of the disc the spiral appears simply subject to an inward and outward motion. However, this is not generally the case and the rotational component often remains partially visible. Unlike circular figures, the stability of orientation of the spiral does not coincide with the minimal trajectory of the points. For any point, the minimal trajectory is orthogonal to the tangent of the spiral at that point and it bends from the center to the periphery in the direction of its actual rotation (see figure 29b). The perceptual identification of the points moving along the minimal trajectories brings about the additional component of phenomenal expansion or contraction. This is so conspicuous that the diameter of the surface, on which the spiral expands (or contracts), is seen to vary accordingly and the surface appears to be globally enlarged or shrunk. Sometimes two further spatial transformations occur on the grounds of this kind of apparent expansion and contraction. The expanding spiral appears to approach the observer together with the surface of the disc, while the contracting spiral appears to recede from her. The rotational motion on the plane is thus transformed in a depth shift. The rotation can also be changed into a full- fledged movement in the third dimension. In this case, the spiral detaches itself from the surface of the disc. If expanding, it appears to approach the observer while rotating in depth from the farther center to the nearer periphery. If contracting, the spiral appears to recede while rotating and converge from the nearer periphery to the farther center. This movement in depth of a configuration in the third dimension has the paradoxical property that the spiral approaches the observer without ever reaching a definite position. The spiral looks like an endless screw. Yet, this phenomenon seldom occurs. In general, the spatial properties of the rotating spiral differ manifestly from those of an object-like appearance or a full-fledged solid body. Instead, a proper three-dimensional phenomenon arises with a hyperbolic spiral (see figure 30).
The linear elements of the spiral of constant pitch are seen as expanding (contracting) at a constant rate. Even if the movement of approaching to (receding from) the observer, which is associated with the phenomenal enlargement (shrinking), involves the whole figure, the spiral has to remain a flat figure for its elements to appear to be moving integrally with one another. This condition does not apply to the hyperbolic spiral. The rotating spiral appears as a solid body developing in depth that advances (recedes) almost rectilinearly in a funnel (see figure 30b). This stereokinetic effect is also evident in other conditions.
If an ellipse is drawn on a rotating disc so that their centers coincide, like in figure 31, the actual trajectory of every point is perceptually decomposed along a radial direction and along the elliptic arc.
The stability of orientation, which is founded on the perceptual identification of the points on the ellipse, makes the rotational component along the elliptic arc invisible. Although every point makes a complete rotation at each disc rotation, thus occupying positions with various directions toward the center of the disc, each point appears to preserve its direction to it and to change solely its distance from it. Since this change of distance takes place for points of the same elliptic figure, the ellipse loses rigidity and appears as an elastic ring that is continuously deformed by the contraction of the stable top and bottom parts along the vertical and the horizontal axis (as in 31b).

As in the spiral, the stability of orientation does not coincide with the minimal trajectories of points and the rotational component does not disappear completely. The minimal trajectory of each point deviates from the radial motion, because it is slightly curved in the direction of the actual rotation of the disc when it is centripetal, or in the inverse direction when it is centrifugal. Therefore, the ring undergoes an apparent stretching along opposite directions with a period of half a rotation of the disc. It is usually not apparent as an autonomous movement, nonetheless it adds an undulating character to the elastic deformations of the ring. As the observation lasts, the figure recovers its rigidity. It appears progressively as a small circle at the center of the disc that is slanted in depth and oscillates with a continuous motion so that each side appears one time for each actual rotation of the disc and then recedes from the observer (see figure 31c). The small circle is a full-fledged solid body. It never rotates around itself and its slant appears always constant, although subjects cannot report the direction of slant because it keeps on changing.
A circle with an eccentrical dot inside of it drawn on a rotating disc gives an example of another kind of non-rigid motion that is transformed into the perception of a solid object moving in depth (see figure 32).
For the stability of orientation, this pattern gives rise to a relative motion on the plane. The point rotates with respect to the circle. Although the dot is obviously bound to rotate inside the circle, its motion appears so independent from the circle that the distance of the dot from the circle seems to change as if the dot could move away from it. For a lasting observation, the dot appears to detach itself from the plane of the disc and to get closer to the observer. Then, the dot begins to show an integral motion with the circle and becomes the vertex of a cone, whose base is the circle (as in 32b). The cone is perceived to move in the three-dimensional space and to perform a revolution around the center of the disc with a slanted axis that assumes different directions at every oscillation during its rotation.

Indeed, there is no difference between these forms of non-rigid motion. A deformation is a relative motion of the parts of a figure. A relative motion of many parts is a deformation of the structure that these parts could form if they were perceived as a coherent figure. Therefore, Musatti claims that the stereokinetic transformation arises because it is the result of the trade-off between stability of orientation and integral motion. The perception of depth or of a solid body moving in the third dimension satisfies the requirement for the perception of constant things and rigid motions.
The important implication is that rigidity is neither a prerequisite of perception nor a property that perceptual objects must satisfy to match the physical rigidity of material objects or the free mobility of physical space. Rigidity is instead an incremental phenomenal result that is due to the transformations that movements induce in the spatial structure of shapes and positions.[1] Every spatial appearance has two coordinated features: form and position, size and distance, in the sense that the features of each couple are perceptually interdependent, because any spatial appearance that has a value of either feature is bound to have a determined value for the other. For instance, a form is delimited by the positions that its parts hold in space in the same way as the positions of the parts, which are its inner and outer boundaries, depend on that form. If the value of a feature, for instance position, becomes indeterminate, the perception of form is altered. If a feature undergoes a change, for instance the form because of the stability of orientation, then a change of positions of its parts in the space is bound to take place. The perceived movements induce transformations on the spatial structure insofar as they exploit the interdependence of these phenomenal features. In the stereokinetic conditions, changes of form and size are traded off against changes of position and distance due to motions. On the one hand, rigidity is perceived as long as it is possible given the kind of changes such features undergo. Rigidity is an incremental phenomenal result because the movements extract as much constant form and size properties as changes of distance and positions allow. On the other hand, not every change induced on form and size can be transformed in displacements of a solid object in space, because it may be that the positions and the distances into which form and size should be converted to preserve rigidity are not allowed by the perceptual structure in which they are coordinated with one another. For example, Musatti reports that if two squares of appropriate size, which partially overlap, are alternately presented at the optimal interval of the stroboscopic motion, subjects see one and the same square that moves laterally on a plane and at the same time becomes bigger and smaller, or usually one and the same square with constant size that moves in depth, approaching and receding from them. However, if the squares differ a lot in size, it is still possible to see the square that becomes greater when it appears nearer and smaller when it appears farther. Therefore, the spatial structure does not allow the deformation to be completely transformed into a change of distance. This is theoretically reasonable, otherwise no change of a perceived object could ever be perceived. If the possible values of positions and distances always allowed a change of form to preserve rigidity, no partial variation of objects of constant form and size might ever be perceived.
Source: Calì Carmelo (2017), Phenomenology of Perception: Theories and Experimental Evidence, Brill.
I have been absent for a while, but now I remember why I used to love this web site. Thank you, I will try and check back more frequently. How frequently you update your website?
Your articles are extremely helpful to me. Please provide more information!
Thank you for sharing this article with me. It helped me a lot and I love it.
Thank you for your post. I really enjoyed reading it, especially because it addressed my issue. It helped me a lot and I hope it will help others too.
Thank you for posting this. I really enjoyed reading it, especially because it addressed my question. It helped me a lot and I hope it will help others too.
Please tell me more about this
You should write more articles like this, you really helped me and I love the subject.